PyThrust is an open-source framework for electric propulsion system analysis, co-design, and parameter optimization in UAV applications. It can be used for multidisciplinary design optimization (MDO) within OpenMDAO. It includes steady-state performance solvers, auto-tuning calibration tools to fit manufacturer test data, and database search tools to map theoretical designs onto real-world brushless motor and propeller catalogs.
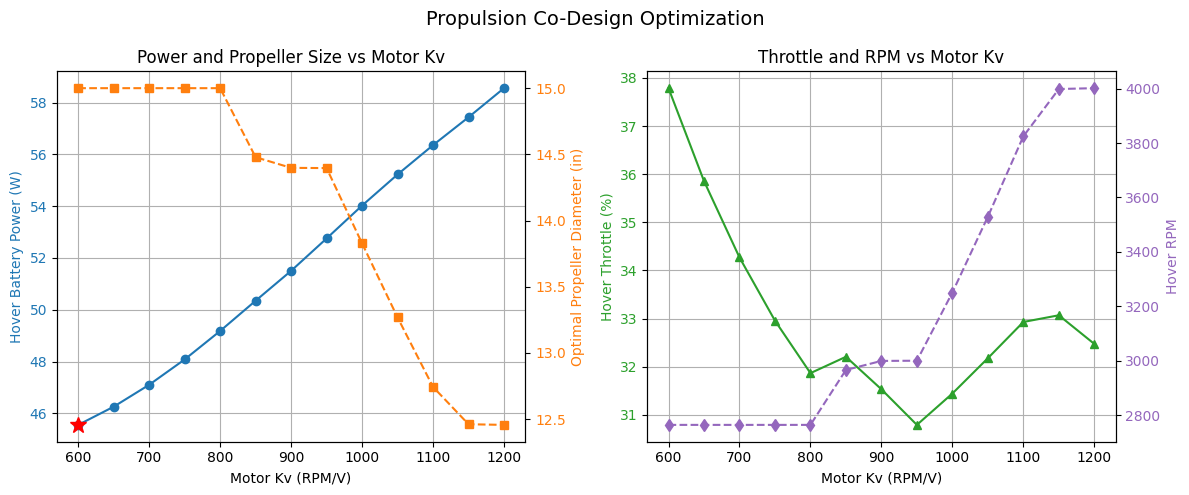
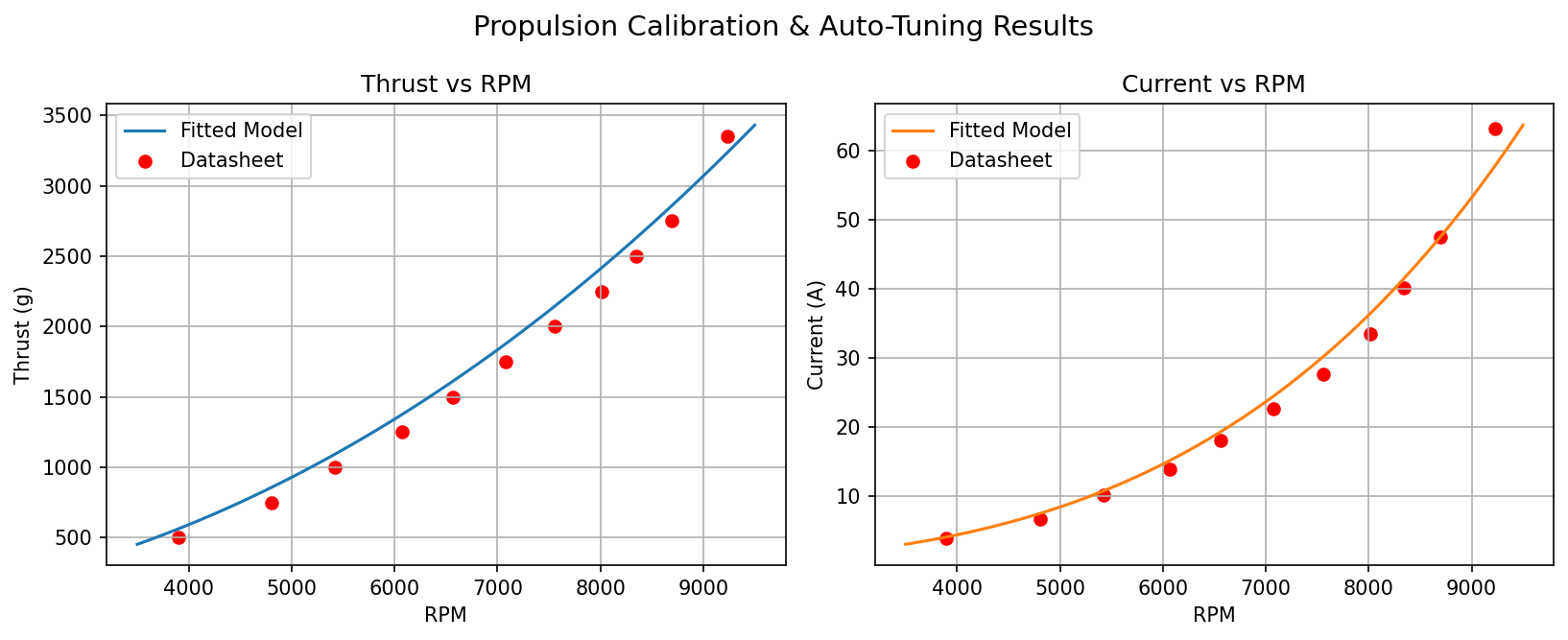
| 1. Propulsion Co-Design Optimization | 2. Propulsion Calibration & Auto-Tuning |
|---|---|
 |
 |
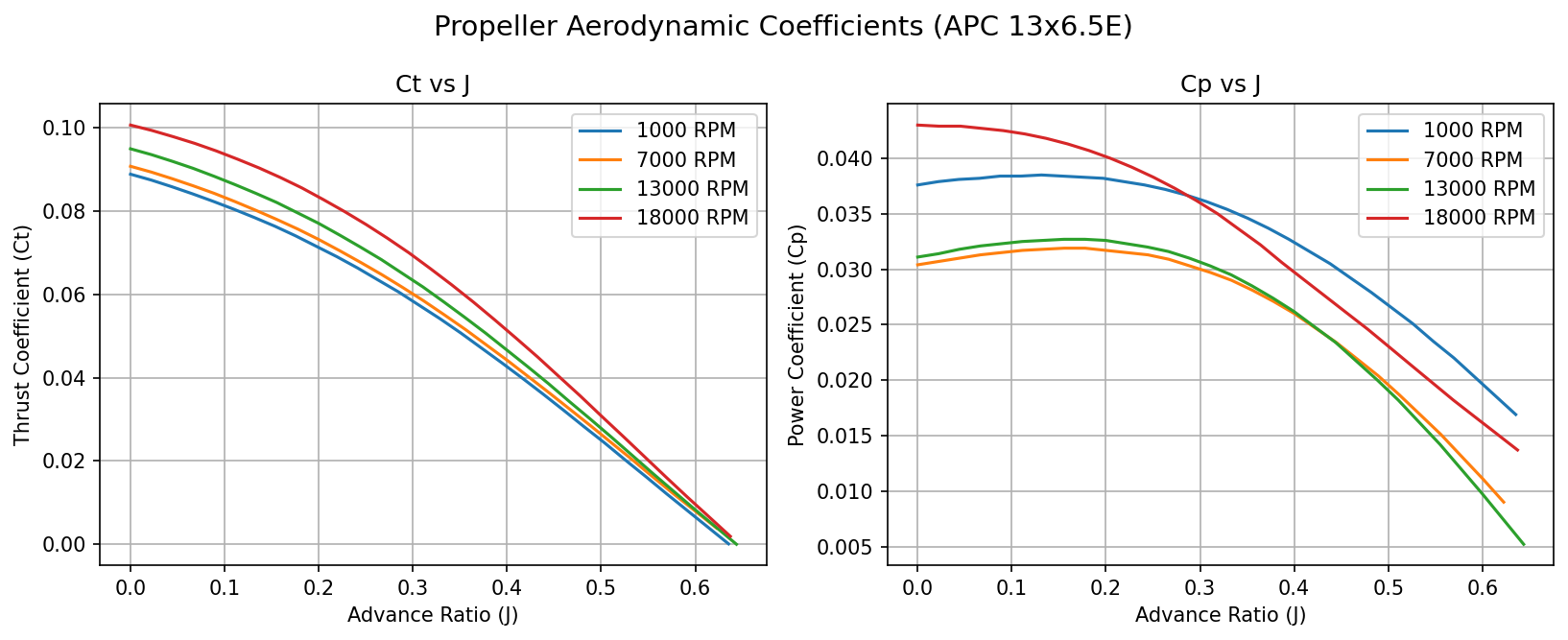
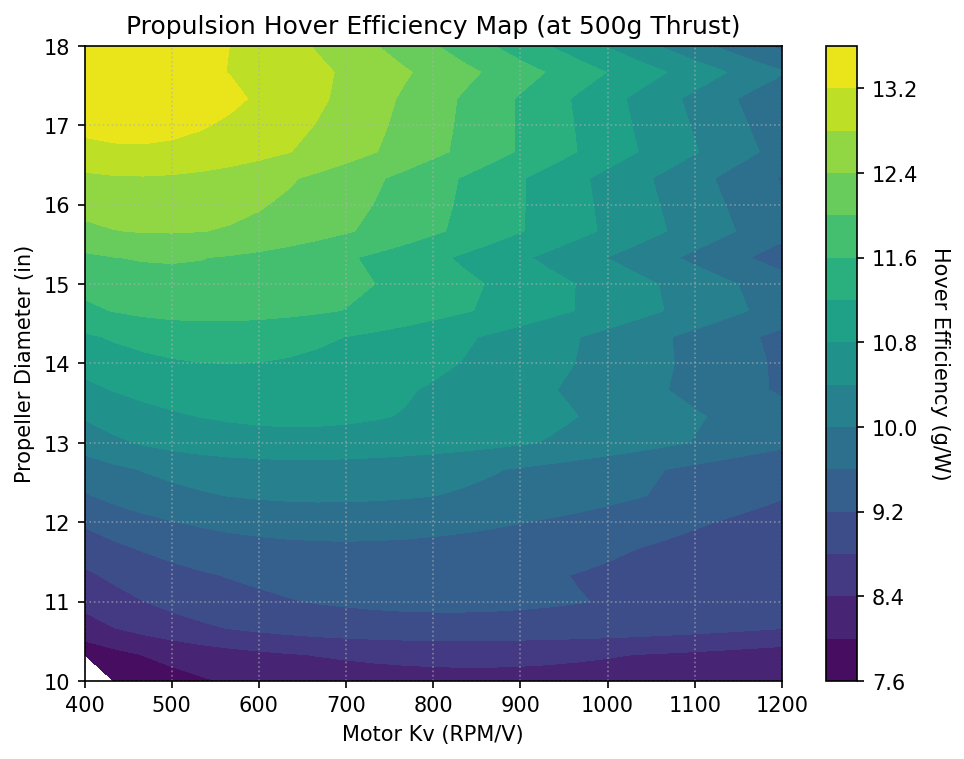
| 3. Propeller Aerodynamic Coefficients | 4. Hover Efficiency Heatmap |
 |
 |
Please see the docs/ folder for design specifications, core mathematical model descriptions, and database details.
PyThrust is licensed under the Apache License, Version 2.0 (the "License"). See LICENSE for the full license.
Copyright (c) 2026 Setuav. All rights reserved.