로봇팔이 부착된 Mobile robot이 다양한 Task를 수행합니다.
- 프로젝트 5분 소개영상 https://youtu.be/9r_tR3T8_8s
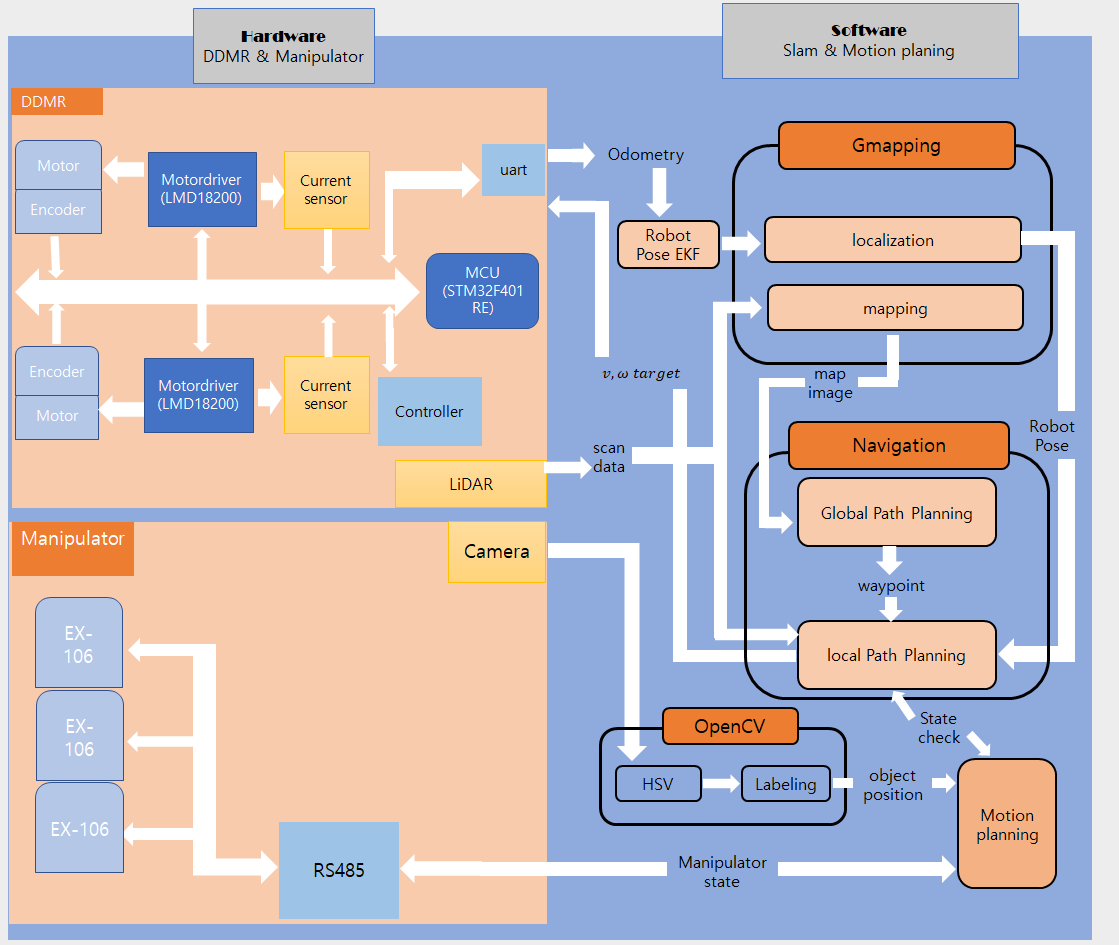
- System Architecture
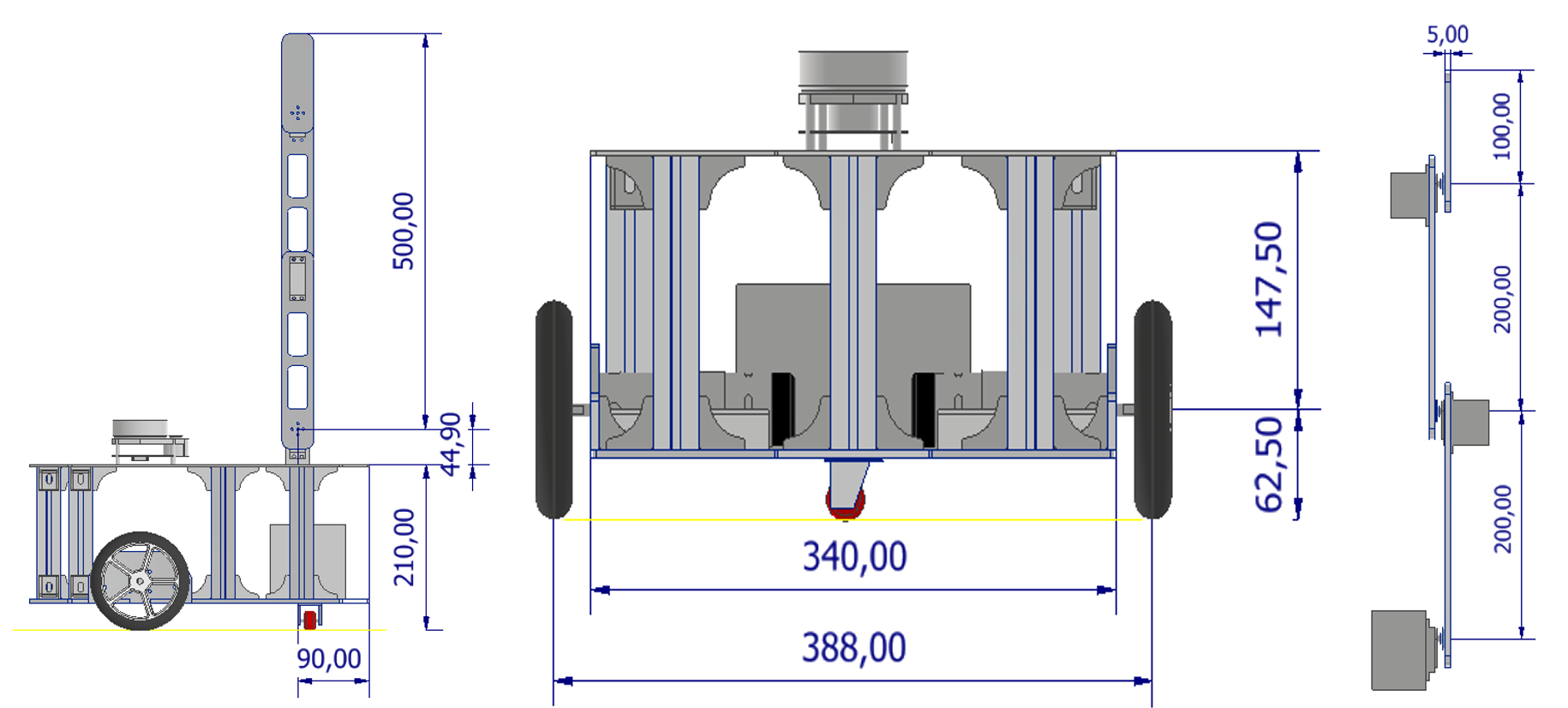
- Hardware Architecture
- 구현내용
- Project Secenarios
- Reference
- 모터제어
- DWA(Dynamic Window Approach)
- 실제 주행
- 3-DOF Inverse Kinematics
- Ros와 MCU간의 Serial 통신
- 세부기술 정리(준비중): https://doroco.github.io/
- [1]Fox, D., Burgard, W., & Thrun, S. (1997). The dynamic window approach to collision avoidance. IEEE Robotics & Automation Magazine, 4(1), 23–33.
- [2]강형석, 「제어기 설계를 위한 DC 모터의 모델 파라미터 측정 및 실험적 보정」, 『한국정밀공학회지』, 제 31권 12호, 한국정밀공학회, pp1147-1154. 김상훈 저,⒊『(DC,AC,BLDC)모터제어』, 서울 : 복두출판사, 2010,pp54-115. https://pinkwink.kr/732
- [3]Rached Dhaouadi, Dynamic Modelling of Differential-Drive Mobile Robots using Lagrange and Newton-Euler Methodologies: A Unified Framework,Adv Robot Autom,2013,pp3-6.
- [4]Modern Robotics, Kevin M.Lynch, Frank C.Park .