Robotics Laboratory 4 Term Project. 참가인원 : 16 남인수, 16 이동규, 16 최승완, 16 함병일
-
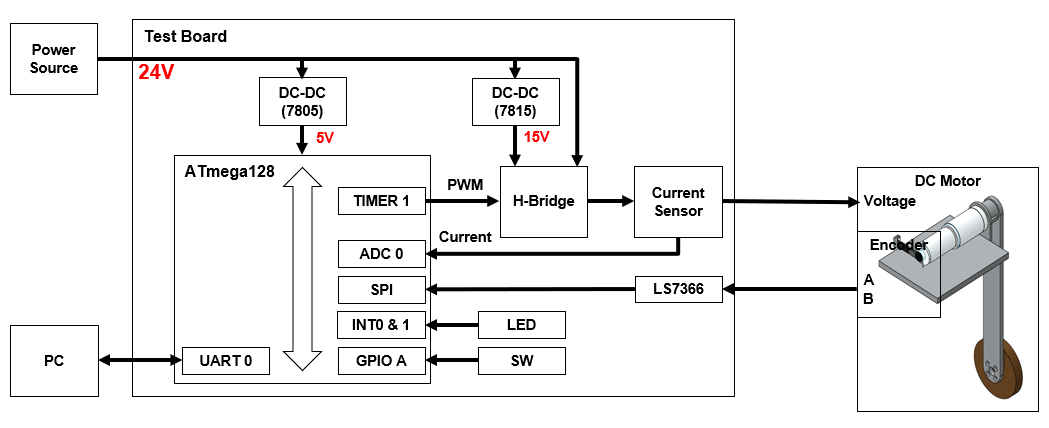
MFC를 통해 Atmega128과 Serial 통신하며, UI를 통해 Motor의 Torque, Velocity, Position Control을 한다.
-
Joint Angle을 입력했을 시 Forward Kinematics를 풀어 End Effector의 Position 출력하고, End Effector의 Position을 입력했을 시 Inverse Kinematics를 풀어 Joint Angle출력한다.
- Atmega128과 MFC의 Serial 통신
- Atmega128 내의 Cascade 방식으로 Current(PI Control), Velocity(PI Control), Position(PD Control) 제어
- 2-DOF ARM의 End-Effector Position과 Joint Angle 간의 Forward Kinematics와 Inverse Kinematics 연산
- MFC : C++
- Atmega128 : C
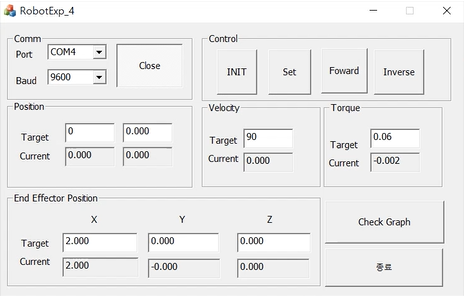
- Forward Kinematics (Joint Angle[degree] : (180, 0) -> Position[m] : (-2, 0, 0))
- Inverse Kinematics (Position[m] : (0, 2, 0) -> Joint Angle[degree] : (90, 0))
- Target Position에 수렴 (Target Position : 0 degree -> 90 degree)
- Torque Saturation (0.05 -> 0.01[Nm])
- 외란을 입력하여 Saturation 검증 (Target Position : (180, 0))