Minimalist&DecoupledReinforcement Learning
pip install minimalist-RLimport gymnasium as gym
import torch.nn as nn
from minimalist_RL.SAC import SAC, ActorCritic
from minimalist_RL.utils import train_RL
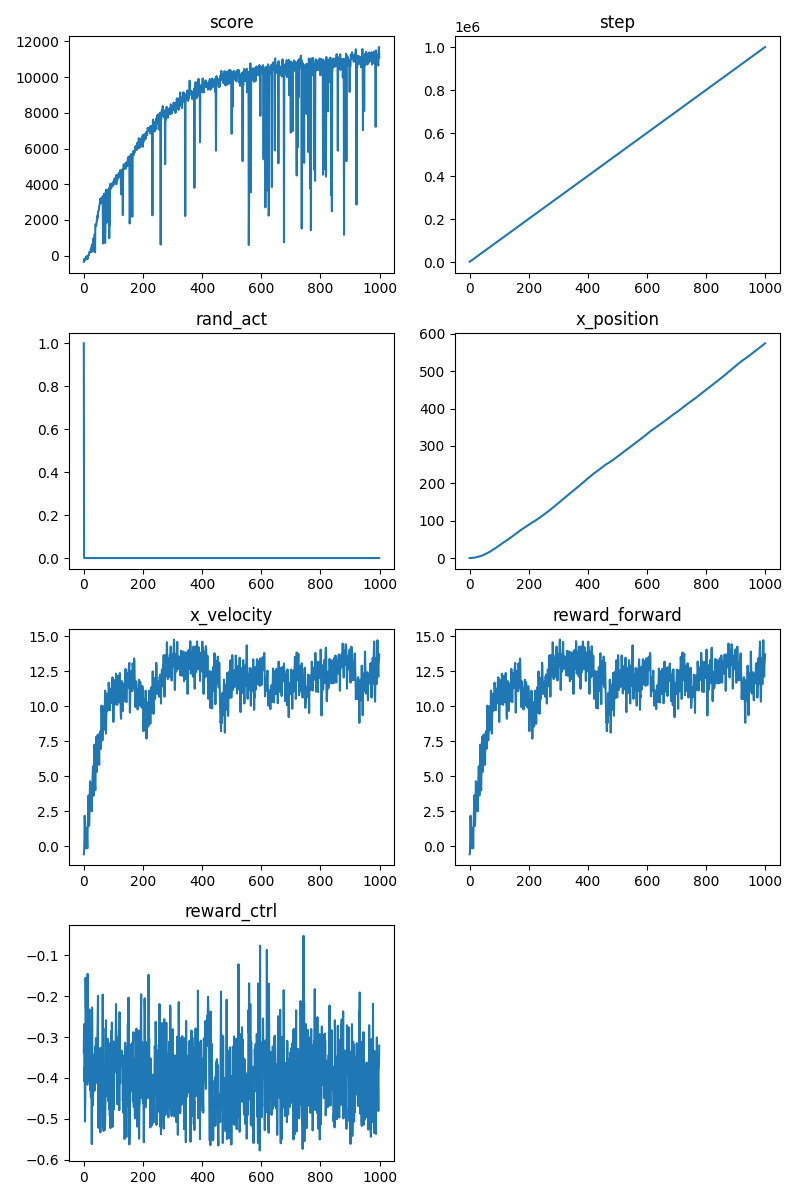
env = gym.make("HalfCheetah-v5")
ac_net = ActorCritic(env, sizes=[256, 256], Act=nn.ReLU)
sac = SAC(ac_net)
train_RL(env, ac_net.pi.tanh_act, sac.update)