Automated Guitar Pick up winder
The Z Spindle to home, then the Traverse carriage home's hit the home switch and back off,
Then it move to it home position approx. 20mm and waits to start
The Traverse carriage should sync to the Spindles(Bobbin) RPM to ensure smooth even layers
of the copper wire.
The encoder A/B should track the pulse to ensure the spindle is turn CW/CCW and its movements
The Z should keep track of each revolution as it only pulse's once per/rev
All counts should be able to go up and down depending on the rotation CW/CCW
The spindle once started should run until it hits the winding target then stop.
Target RPM 1000, 1500. The target turns depend on the pick up being wound
24v 6a Power supply
TMC2209 drivers
Encoder PPR 360 Quadrature A, B, Z, 5v, Gnd -- Resolution 1440 lines/pulse's
BTT SKR-Pico V1.0
Nema 17 Stepper Motor 1.8' 200 Steps -- 8 Microstepping -- 1600 Microsteps
Linear slde 100mm Whit Nema 11 stepper 6.0mm pitch lead screw
I2C 4 Line 20 charactor LCD 2004A
I Would like to use an STM32 but I not familiar whit it.
All of my past development has been on the Arduino
I have decided to move to the Pico using VSCode IDE, and the Pico-sdk
I have chosen the SKR-Pico control board since it has most of what I need on board in a small package
Bobbin 7 mm Width
copper winding Wire 43 AWG -- 0.0024" -- 0.0635 mm
7mm / 0.0635mm = 110.2362 Turns per layer of wire
Single coil is approx 5000 Turns approx. P90 coil is 10,000 turns approx.Reference:
https://cdn-shop.adafruit.com/datasheets/TC2004A-01.pdf
https://github.com/bigtreetech/SKR-Pico/blob/master/Hardware/BTT%20SKR%20Pico%20V1.0-PIN.pdf
https://datasheets.raspberrypi.com/pico/getting-started-with-pico.pdf
https://github.com/Klipper3d/klipper/tree/master/src
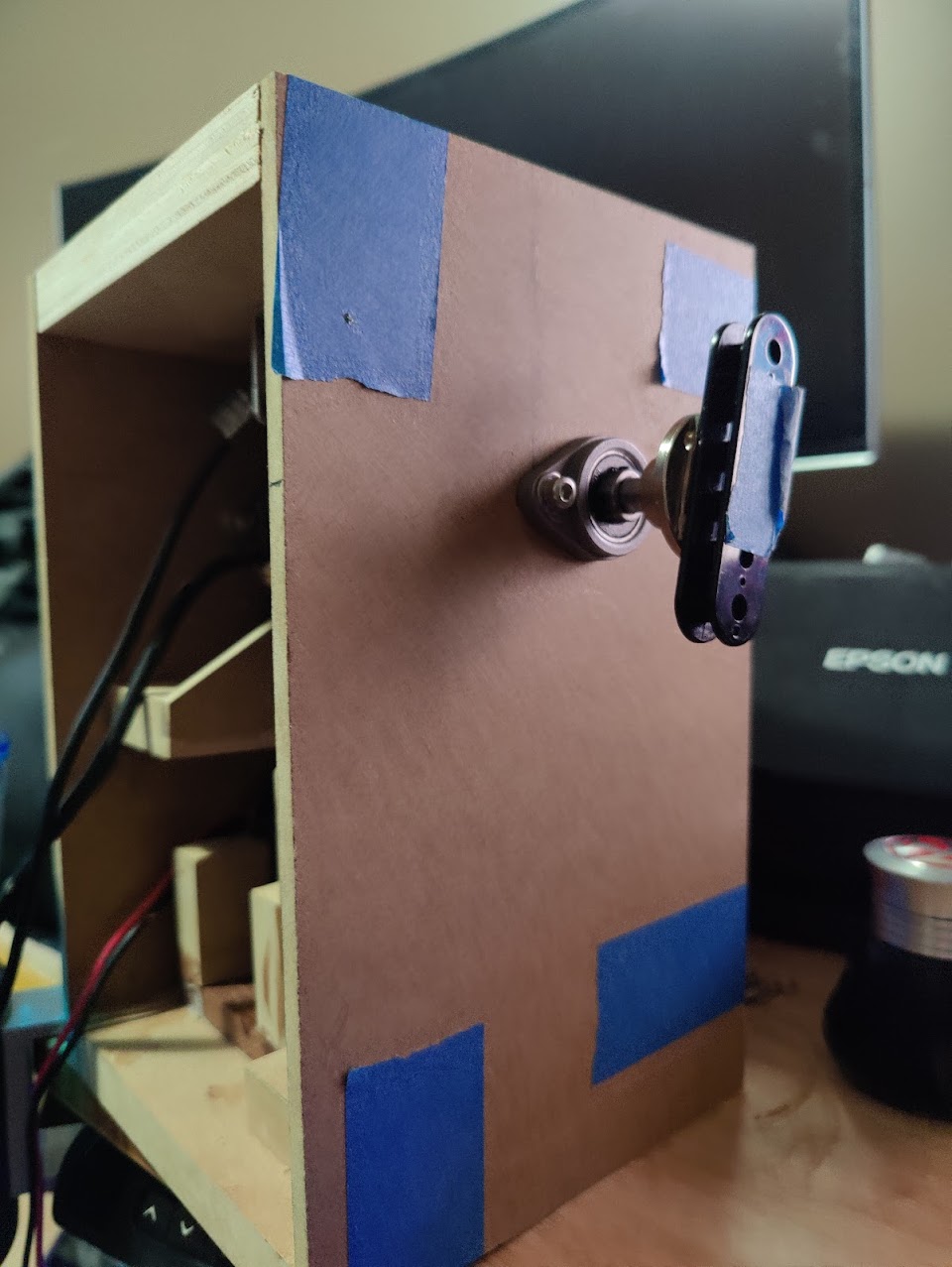
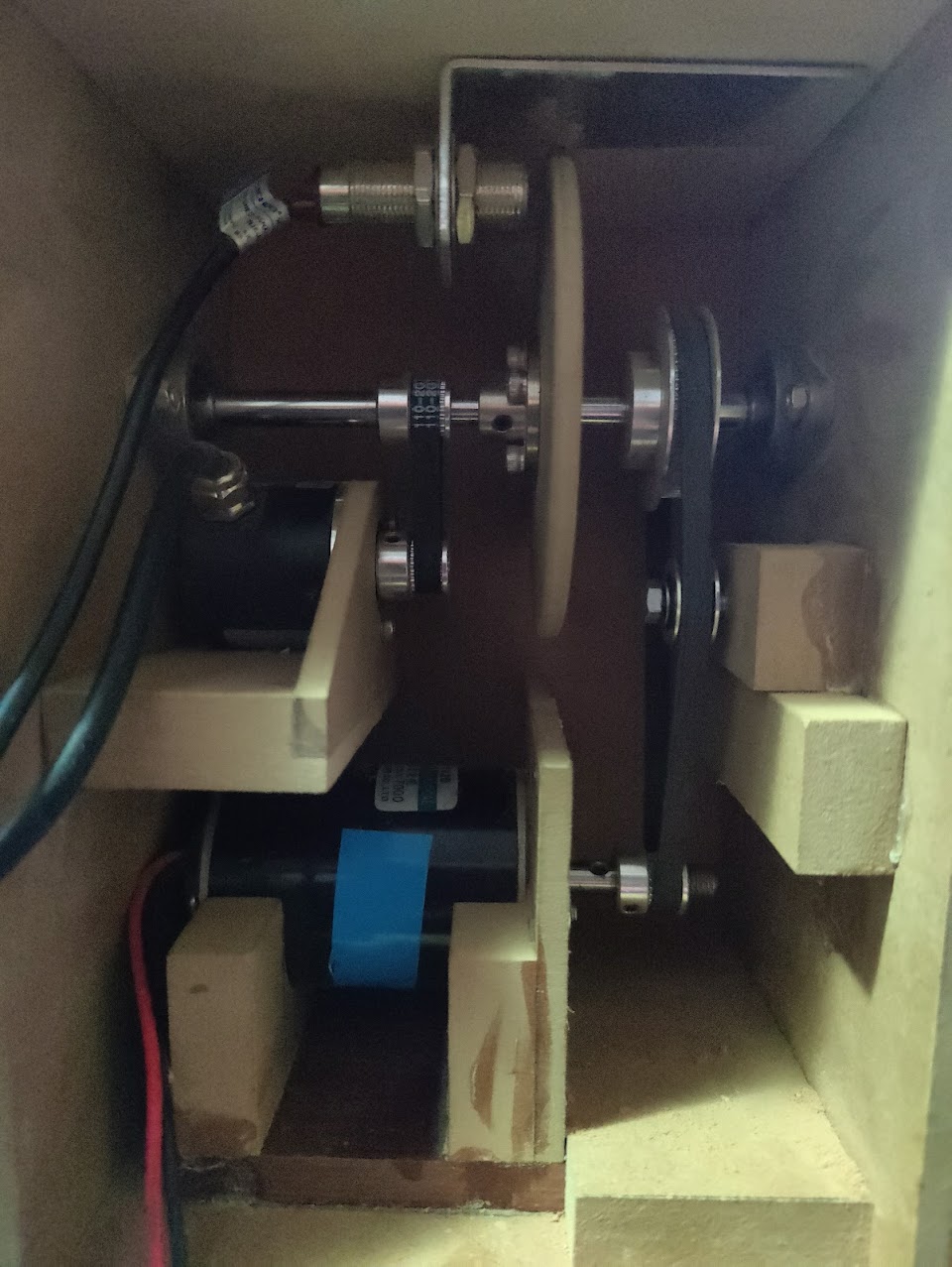
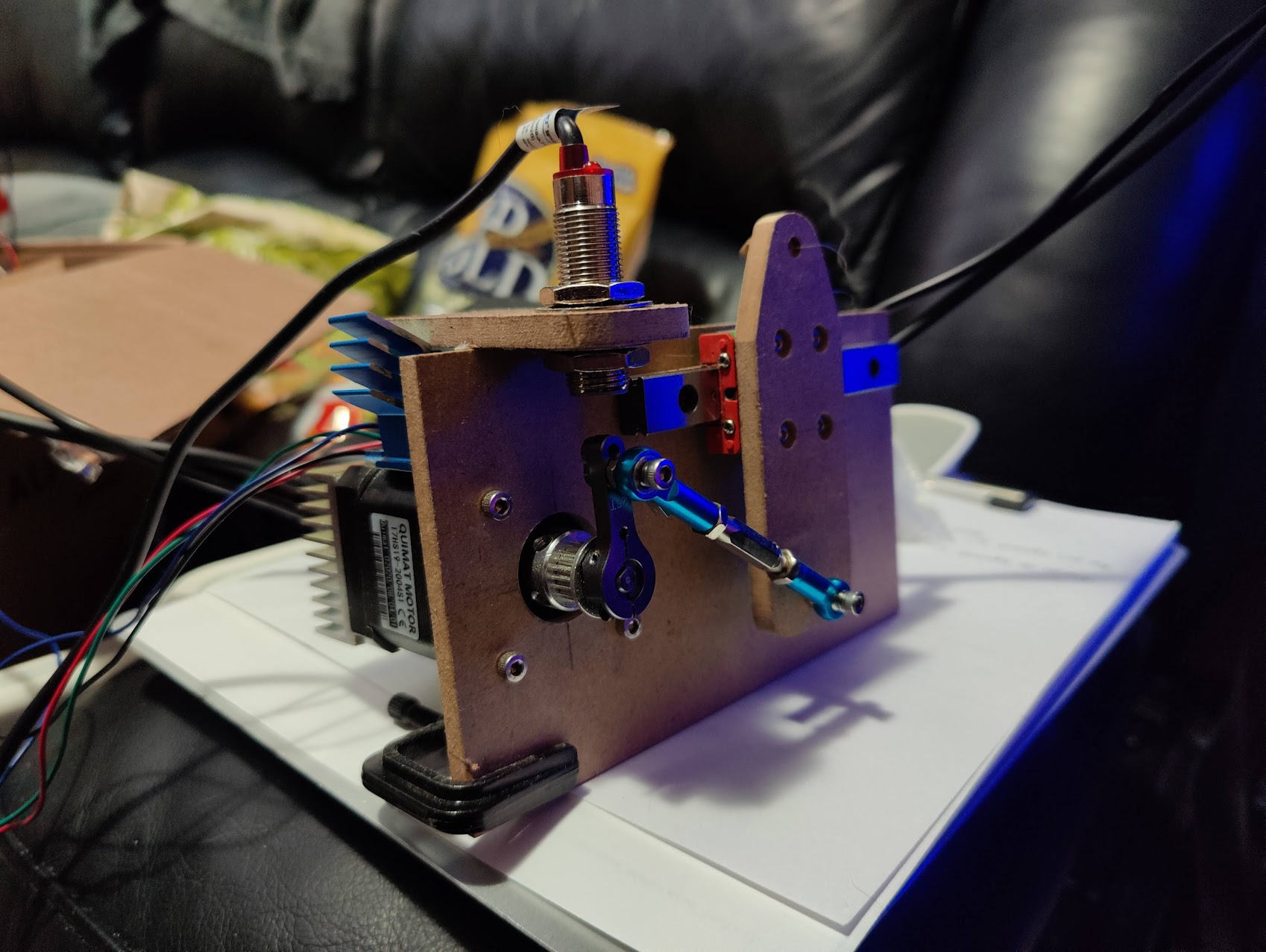
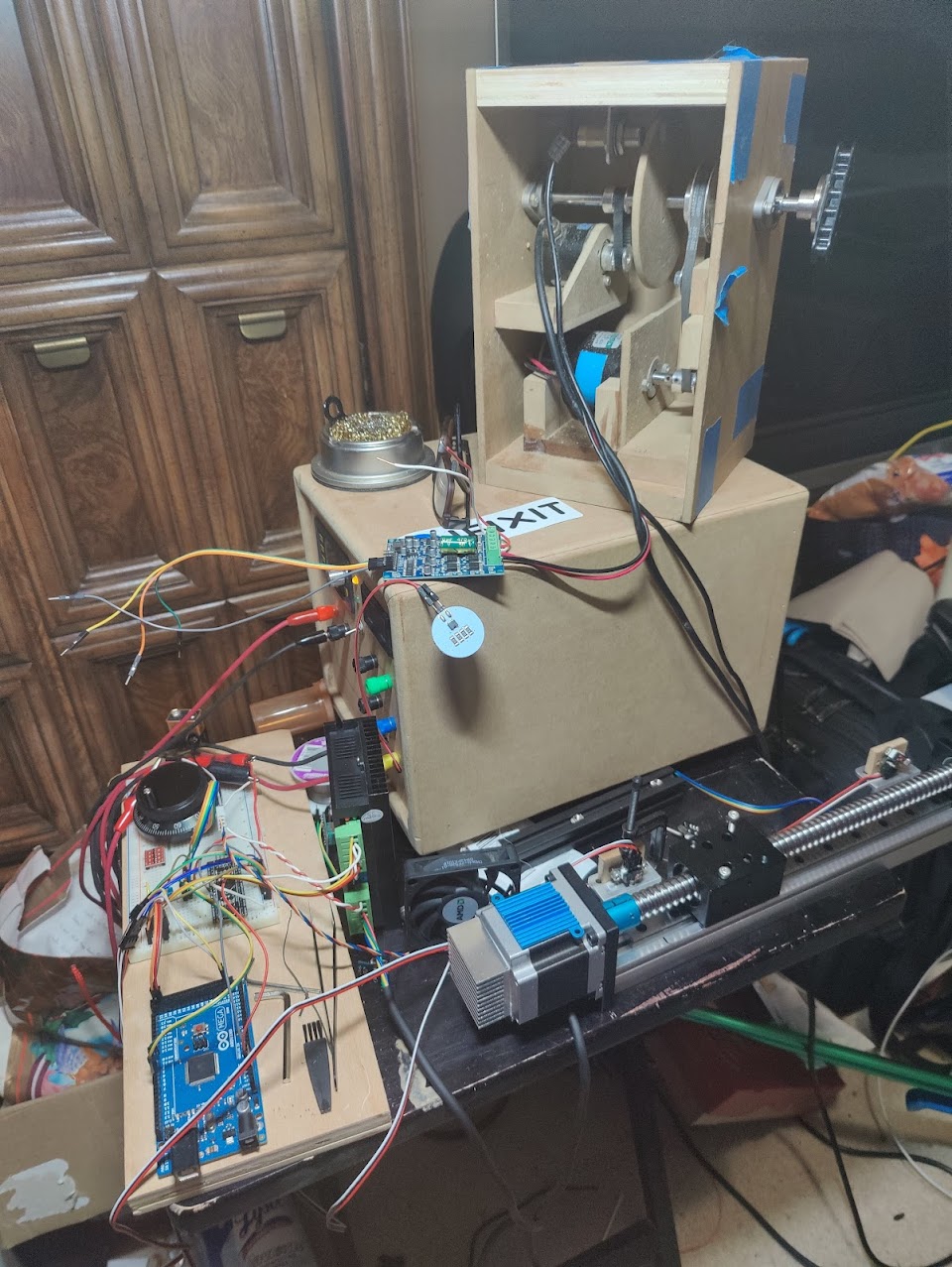
New Photos

Some Prototype Photo's