

- Summary - Image based Particle Filter for Drone Localization
- Live Demo
- [Step 1] - Get code via
git clone https://github.com/briancsavage/Image-Particle-Filter.git - [Step 2] - Navigate to repository locally via
cd /path/to/Image-Particle-Filter - [Step 3] - Install dependencies via
pip install -r requirements.txt - [Step 4] - Run Streamlit application locally via
streamlit run GUI.py
| Code | Explaination |
|---|---|
 |
Heuristical Estimator for Position
|
 |
Hog Transformer
HOG Transformer to compute the histogram of oriented gradients in 2x2 patches across the image. This returns a flattened feature vector for the image that expresses the directionality of the color change across the patches of the image.
StandardScaler() to scale the feature vectors to a zero mean and unit variance.
|
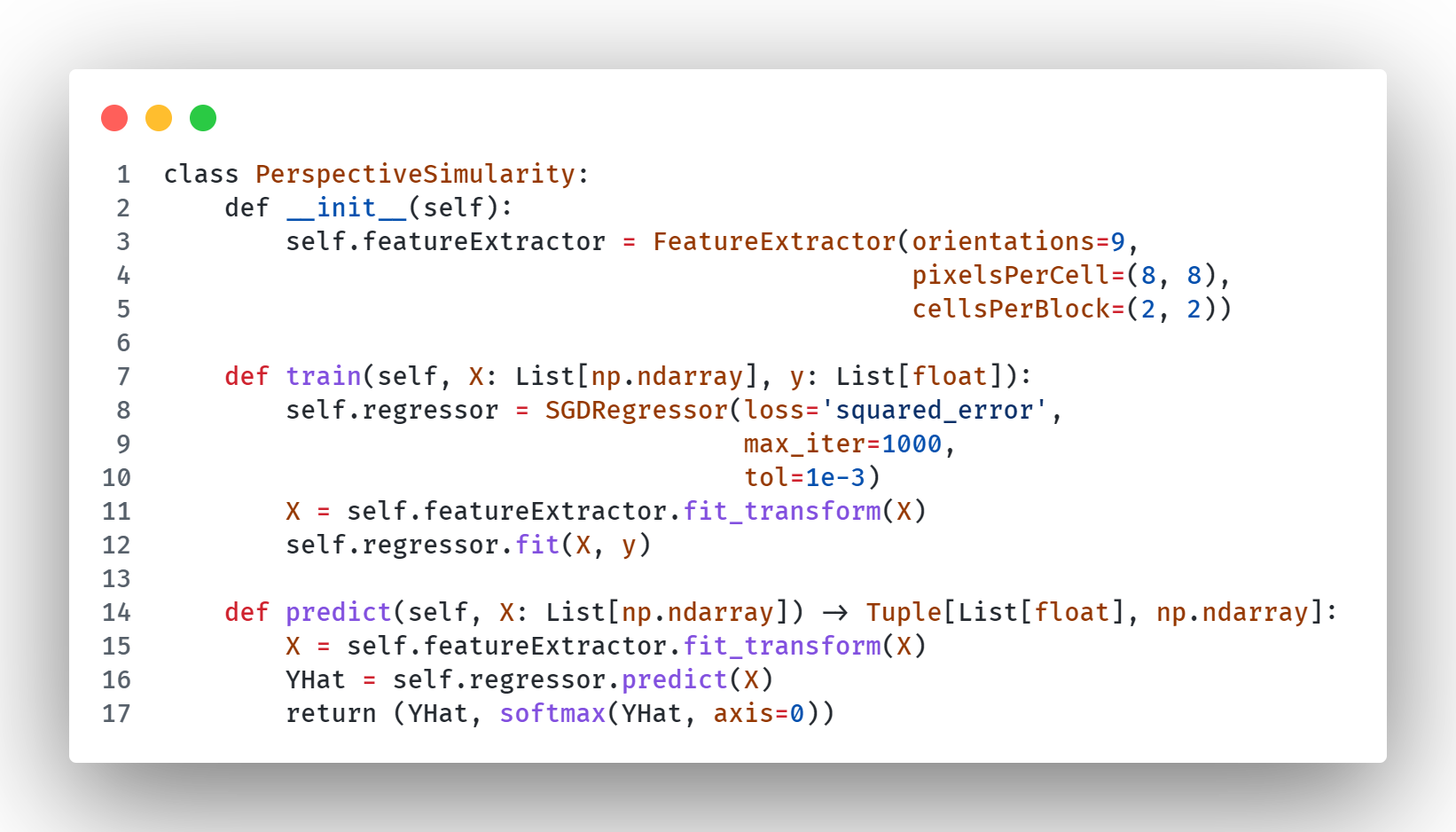 |
Learning Based Estimator for Position
PerspectiveSimularity class, we first initialize the hog feature extractor from above. Within the training step, we use a SGDRegressor as the model to train. The justification behind using a SGD algorithm over LBFGS or ADAM is since we have a minimal amount of data relative to the preformance benefits of ADAM, and SGD is more likely to converge to a global minimum than LBFGS at the expense of training time.
p(z|x) values for the provided images. Using these estimates, we apply a softmax function on the array to find the corresponding confidence levels for each of the tested for positions. |



