An open-source infrastructure for wearable robotics
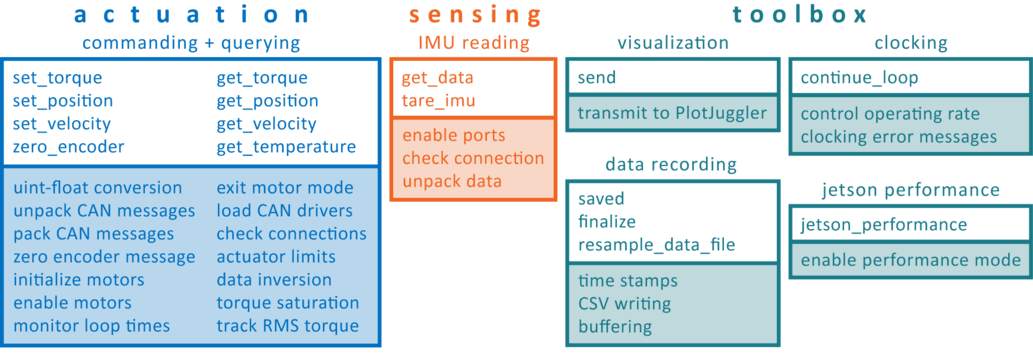
Epically Powerful is an open-source robotics infrastructure that streamlines the core framework of robotic systems — handling communication, timing, actuator monitoring, visualization, and data logging — so researchers can focus on controllers, experiments, and science.
Built for modularity, it unifies power systems, single-board computers, actuators, and IMUs into a cohesive plug-and-play setup. Designed for modularity and speeding up the custom build process, it offers:
- Python-based coding interfaces for easy integration with commercial quasi direct drive (QDD) actuators and common IMU sensors
- Parts lists, compatibility guides, and tutorials for rapid hardware and software setup
- Example controllers and real-time visualization through PlotJuggler
- Extensive documentation on every step of the setup process
Epically Powerful lowers the barrier to building custom robotic systems without enforcing a pre-specified form factor, enabling researchers to go from raw hardware to modular, robust devices quickly and effectively.
- Quickstart steps
- Broader setup guide
- API
- Example controllers
- Part picking guide
- Component sheet
- Video tutorial playlist
Epically Powerful was built by robotics researchers to make wearable robotics development faster, cleaner, and more reproducible.
- Hardware-agnostic: Works with multiple actuator and sensor brands — you’re not locked into any vendor or form factor.
- Reproducible: Shared configuration files, open schematics, and detailed setup docs make it easy to rebuild across labs or replicate prior builds.
- Lower barrier to entry: Verified hardware compatibility, handling of low level and backend code operation, and Python-based interface lowers the barrier for roboticists at all stages.
- Built for iteration: Swap hardware and test new controllers with minimal reconfiguration.
- Open and vetted: Maintained by a research community actively extending its capabilities across new hardware platforms and verified by multiple research groups.
In short, Epically Powerful turns “getting your robot up and running” from a multi-week endeavor into a single-day setup.
You can install Epically Powerful via PyPI using pip by running:
pip install epicallypowerful
We recommend using our documentation website for guidance on identifying your hardware components, setting up and assembling your system, and verifying software functionality.
That’s it! You’re ready to build something (ba dum tss) epically powerful.
Full documentation (including API, part picker, hardware setup, and usage examples) can be found in the documentation website.
- Actuators: CubeMars AK series, RobStride series, CyberGear Micromotor
- Single-board computers (SBCs): NVIDIA Jetson Orin Nano and Raspberry Pi
- IMUs: MicroStrain (MSCL), MPU-9250 (I²C), and OpenIMU (CAN)
- Power: Li-Ion drill batteries and LiPo options
See the full Part Picker and Setup pages in the documentation for model-specific recommendations, wiring diagrams, and supporting components (e.g. CAN transceivers, fuses, safety pouches, etc.).
If you use Epically Powerful in your research or publications, please cite:
JK Leestma, SR Nathella, CPO Nuesslein, S Mathur, GS Sawicki, and AJ Young, "Epically Powerful: An open-source software and mechatronics infrastructure for wearable robotic systems", (in review at IEEE Access). DOI: https://doi.org/10.48550/arXiv.2511.05033
We welcome contributions from the robotics community! If you have improvements, extensions, or bug fixes, feel free to open a pull request or start a discussion under the “Issues” tab. We also use GitHub Discussions as a space for conversation — a great spot for questions, implementation ideas, suggestions for new features, connecting with other users, or sharing projects built with Epically Powerful.
This project is released under the GPLv3 License.
- JK Leestma, S Mathur, M Anderton, GS Sawicki, and AJ Young, Dynamic duo: Design and validation of an autonomous frontal and sagittal actuating hip exoskeleton for step placement modulation during perturbed locomotion, Robotics and Automation Letters, 2024.
- RTF Casey, CPO Nuesslein, F Davenport, J Wheeler, A Mazumdar, G Sawicki, and AJ Young The Second Skin: A Wearable Sensor Suite that Enables Real-Time Human Biomechanics Tracking Through Deep Learning, IEEE Transactions on Biomedical Engineering, 2025.