T CNC
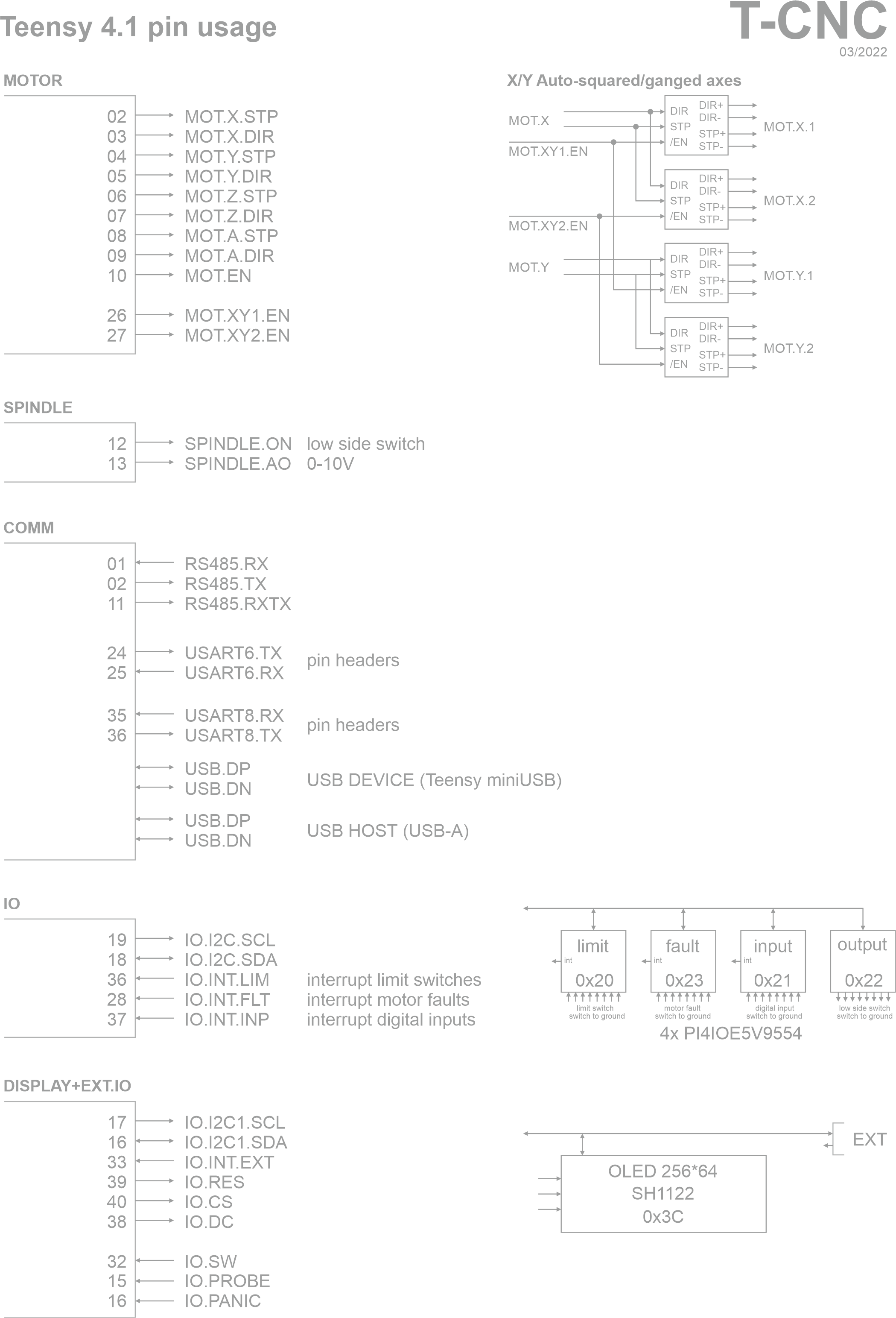
I build an carrier board for Teensy 4.1
Prepared for Auto-squared/ganged axes with an alternative approach to move the axes using additional logic.
The board uses several I2C port expanders with interrupt cappabilities, each at a certain functional block.
The Steppers are attached using CAT5 connectors and implement the fault input from closed loop motors.
An OLED display 256x64 and a 5 way switch will can show actual status and allow change of parameters on the controller.