Official repository for the ICLR 2026 paper:
D-REX: Differentiable Real-to-Sim-to-Real Engine for Learning Dexterous Grasping
Haozhe Lou · Mingtong Zhang · Haoran Geng · Hanyang Zhou · Sicheng He · Zhiyuan Gao · Siheng Zhao · Jiageng Mao · Pieter Abbeel · Jitendra Malik · Daniel Seita · Yue Wang
Project page: https://louhz.github.io/drex.github.io/ Paper (OpenReview): https://openreview.net/forum?id=13jshGCK9i
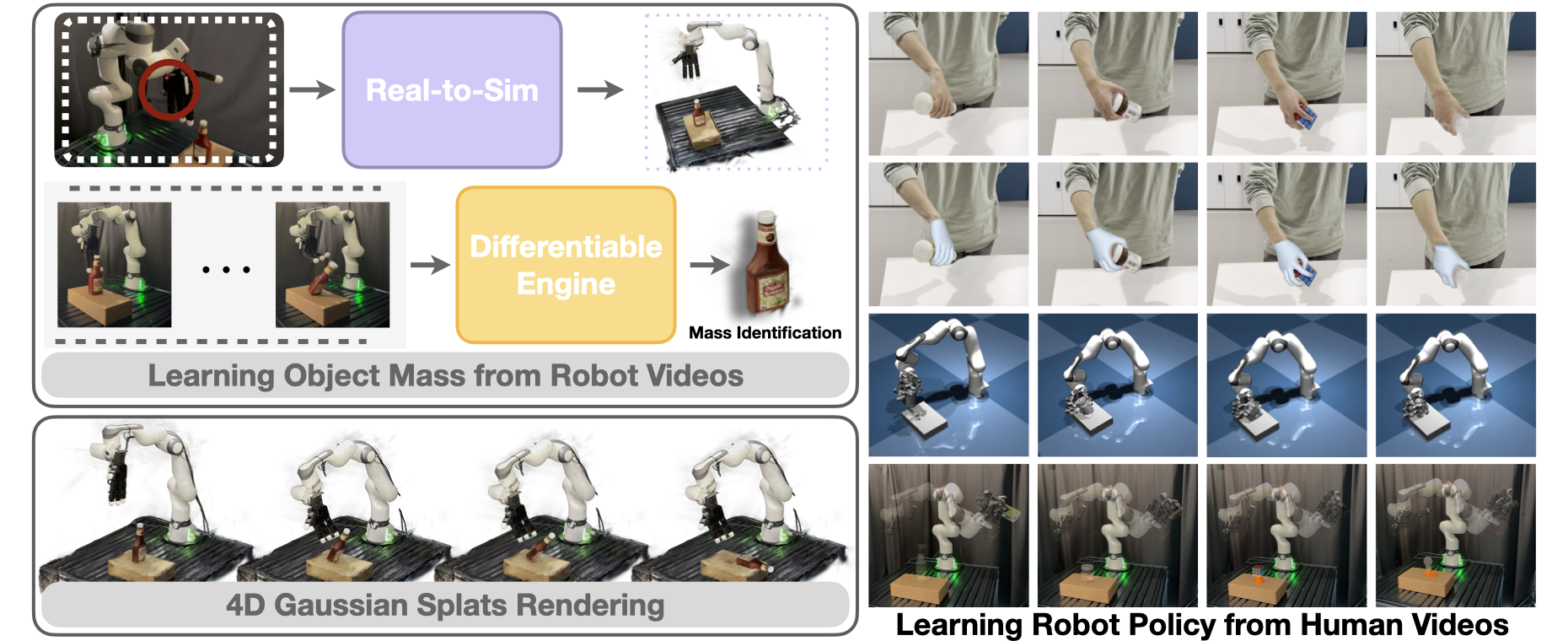
D-REX is a differentiable real-to-sim-to-real engine for dexterous manipulation that:
- reconstructs object geometry from real videos using Gaussian Splat representations,
- performs end-to-end mass identification through a differentiable physics engine using real observations and robot interaction data,
- enables force-aware grasping policy learning by transferring feasible human video demonstrations into simulated robot demonstrations, improving sim-to-real performance.
Keywords: Real-to-Sim-to-Real · Differentiable Simulation · Learning Robotic Policies from Videos · System Identification
This repo is intended to support:
- Real-to-Sim reconstruction (Gaussian Splats + simulation-ready assets)
- Mass identification via differentiable physics (system identification from interaction data)
- Human-to-robot demonstration transfer (from human videos to feasible robot trajectories in sim)
- Force-aware policy learning for dexterous grasping and manipulation
If you are looking for the algorithmic overview and results videos, start with:
- Project page: https://robot-drex-engine.github.io/
- OpenReview paper: https://openreview.net/forum?id=13jshGCK9i
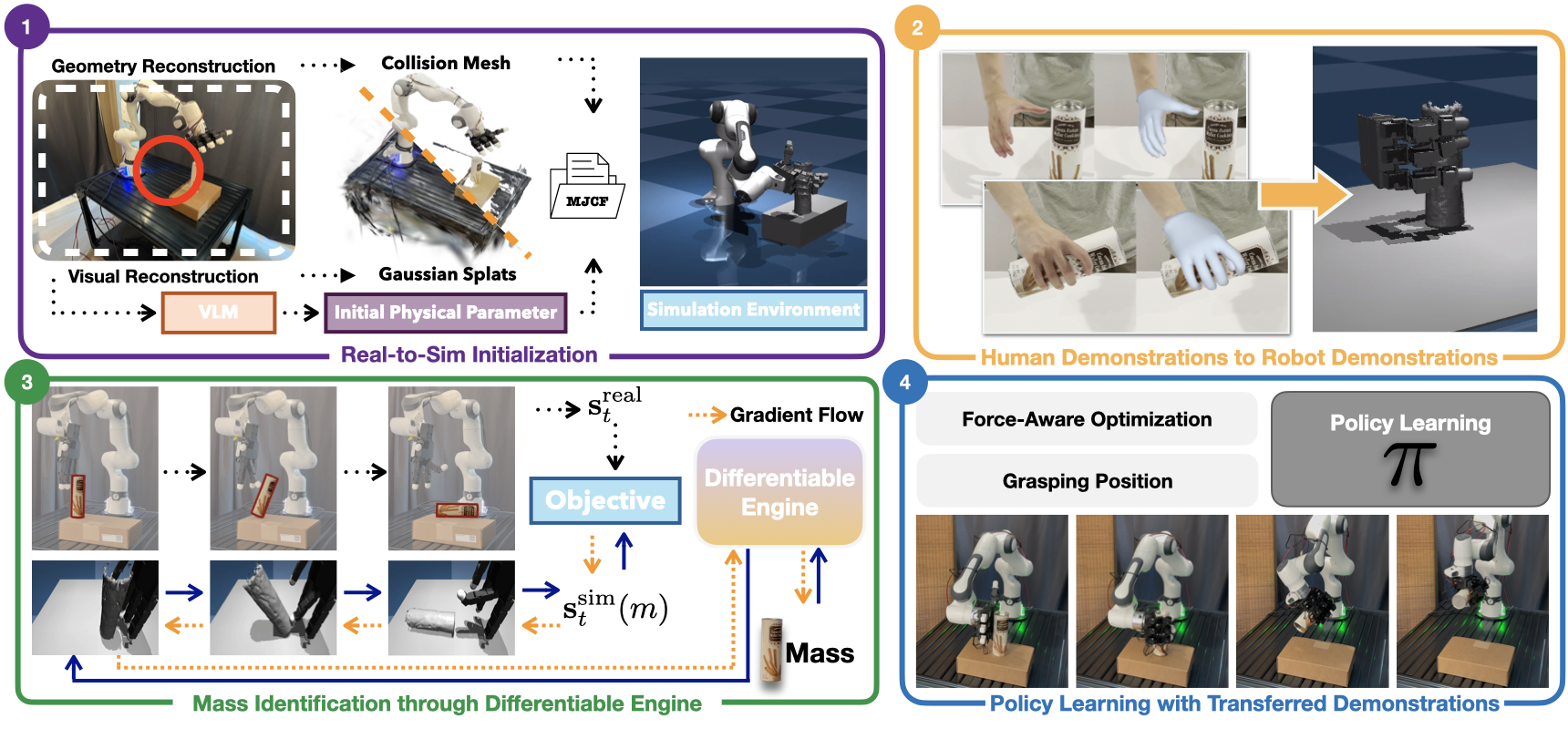
Our pipeline can be viewed as four connected components:
-
Real-to-Sim
- Capture videos of the scene / object.
- Reconstruct geometry with Gaussian Splat representations.
- Build simulation assets (e.g., collision / simulation proxies) for a digital twin.
-
Learning from Human Demonstrations
- Collect limited human demonstrations from videos.
- Convert/transfer these to feasible robot demonstrations in simulation.
-
Mass Identification (Differentiable Engine)
- Execute robot interactions (e.g., pushing) and use real observations + robot signals.
- Optimize object mass through a differentiable simulation objective to obtain physically plausible digital twins.
-
Policy Learning
- Train a grasping/manipulation policy conditioned on the identified mass.
- Use force-aware constraints/objectives to reduce sim-to-real failures caused by mass mismatch.
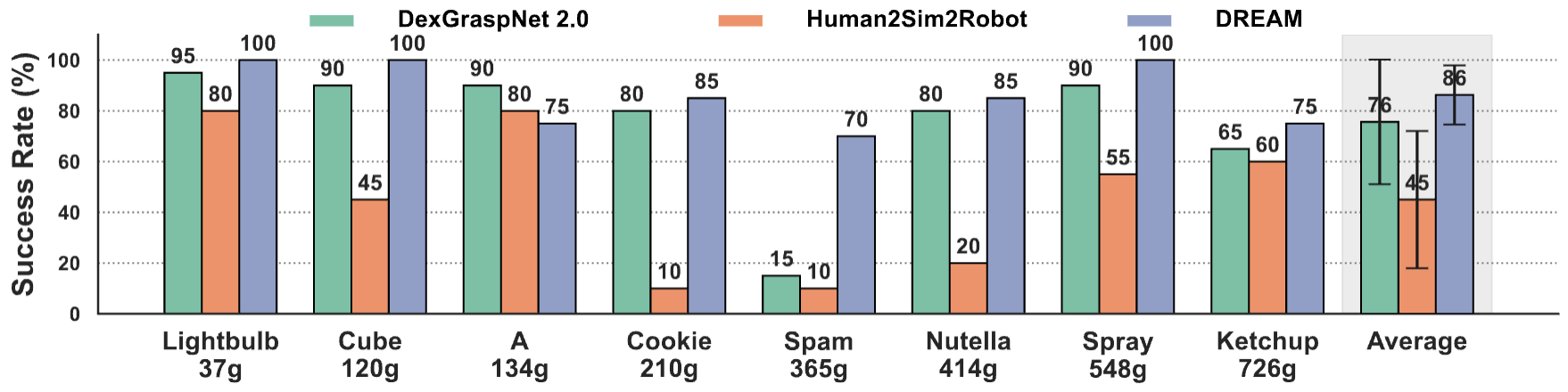
D-REX demonstrates robust mass identification across diverse object geometries and mass values, supporting physically plausible digital twins.

Mass estimates enable mass-conditioned, force-aware policies that achieve stronger real-world grasping performance, especially for heavier objects where baselines degrade.
The project page includes additional qualitative results:
- grasping examples across multiple objects (e.g., household items with different mass/shape),
- mass-policy sensitivity experiments showing success drops when train/eval masses do not match,
- more dexterous tasks beyond basic grasping (e.g., tool-like objects and everyday interactions).
This codebase has not been fully tested with the compatiblity, I will try to setup this pipeline on a new set of franka-leap and desktop for the consistency and clearity, the config is pretty noisy now and i will clear this up later
git clone https://github.com/louhz/D-rex
cd D-rex
conda create -n drex python=3.10
conda activate drexInstall cudatoolkit, we recommend cuda 12.8
We recommend installing PyTorch inside the drex conda environment after activation.
CUDA 12.8
pip install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu128
pip install --no-build-isolation 'git+https://github.com/facebookresearch/detectron2.git'
pip install --no-build-isolation 'git+https://github.com/mattloper/chumpy'Then install necessary packages:
pip install -r requirements.txtPlease follow the https://github.com/lixiny/manotorch for the installtion and checkpoint download. And put the downloaded checkpoint to the proper path for learn from human retargeting
mano_assets_root="./manotorch/assets/mano"Please follow https://github.com/janehwu/mcc-ho for install. If the pytorch3d is unable to install with drex main environment, please build a seperate environment for mccho specifically, this is just part for data generation.
Please follow the https://github.com/colmap/colmap for install
You can find the example for rendering and reconstruction in https://github.com/louhz/robogs And the download instruction. Only minimum code for physically consistent rendering is added in this repo
For the real2sim dataset you are input the 360 degree video and obtain the final asset
For the human demonstration you will have the grasping demonstration and have the retargeted robotic motion
For mass identification, you will input control signal , asset from real2sim and the object trajectory by foundation pose, obtain the final mass
We take Cookie as an example for our whole pipeline
Real2sim The first step is to reconstruct mesh and gaussian splat for real2sim. Then put it to proper place in the _data, like policy/_data/leap_hand/scene_cookie.xml
Learn from Human Process the demonstration video with Hamor and Mcc-ho, after this, you will have the process_leap_data.npy for the grasping control command for the dexterous hand and the relative pose between the object and the hand
Mass Identification Load the object trajectory by foundationpose and the robot control signal run the simulation for
python system_id/diff_obj/mass_estimator_cookie.pyObtain the final mass value
Policy Learning
Run for training
python policy/policy_by_object/cookie/onnxgrasp.pyInference
python policy/policy_by_object/cookie/onnxgrasp_infe.pyThe real world control script can be find here, please install the leap_hand module from the official website
python policy/policy_by_object/cookie/realworld_control.py1: For the human hand retargeting, the Hamor only learns the relative scale instead of the absolute scale, thus, we need manually align and fix the human hand scale gap for different human manipulation data source, we hope this can be solved by following work.
2: For the system identification, the mj_model and mj_data cannot save the running process information, thus, we decide to use a txt to save the rollout information and load it again for system identification. A smarter engineering trick can help for the code clearance and optimization speed.
3: The crop and obtain of the object mesh and gaussian splat can be finished by SAM3D with accurete depth scale, we never test this method but it is promising to test this for future data collection and system work.
replace path
rewrite config
clean up readme and comment
Final integration